Prioridades
Nota: As animações poderão apenas funcionar se o "Zoom" do browser estiver a 100%. Caso seja necessário ajustar, aceda às definições/opções do browser.
Problema:
Um carro transporta os produtos de três linhas de produção independentes para um tapete de evacuação:
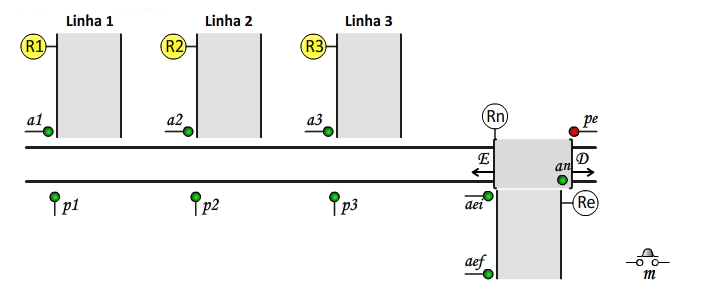
O sistema é constituído por vários sensores: ai – deteta a presença de uma peça na linha i, com i = 1,2,3; an – deteta a presença de uma peça no carro de transporte; aei – deteta a presença de uma peça no inicio do tapete evacuação; aef – deteta a presença de uma peça no fim do tapete evacuação; pi – fim de curso, indica o posicionamento do carro no final da linha i, com i = 1,2,3; pe – indica o posicionamento do carro no inicio da linha de evacuação. Os atuadores são os seguintes: E – desloca o carro para a esquerda, em cima dos carris; D – movimenta o carro para a direita; Ri – motor do tapete rolante i, com i = 1,2,3 (linhas), n (carro), e (evacuação); A capacidade de transporte do carro é de uma unidade e este encontra-se junto ao tapete de evacuação. Utilizando Grafcets vão ser implementados os controladores lógicos que correspondem às seguintes situações:
Exemplo 5.1:
- O problema proposto é resolvido com a utilização de grafcets parciais.
- No grafcet do carro de transporte temos uma escolha de sequência que é definida pelo uso de prioridades.
- É estabelecida uma ordem para transportar os objetos das respetivas linhas, caso exista mais do que uma linha ocupada.
- É dada a possibilidade de alterar a prioridade das linhas pelo menu de opções "Prioridade".
- As prioridades das sequências são definidas da esquerda para a direita. Isso mesmo pode ser observado pela alteração das recetividades associadas no início de cada uma das sequências.
Nota: Existem vários botões, por baixo do botão/interruptor m, que permitem controlar o decorrer da animação. Assim, para uma melhor compreensão da evolução do grafcet é possível pausar a animação e acompanhar a sua evolução passo a passo
a animação e acompanhar a sua evolução passo a passo
 . A qualquer momento pode ser retomada a execução normal
. A qualquer momento pode ser retomada a execução normal
 . O botão
. O botão
 permite inicializar toda a animação.
permite inicializar toda a animação.
Inicialmente o carro e todos os tapetes estão vazios. A linha 1 está em funcionamento, o motor para quando é detetada uma peça pelo respetivo sensor de fim de linha a1 e vai aguardar até que o carro venha efetuar o seu transporte para a linha de evacuação. O mesmo se aplica às linhas 2 e 3. Ao premir o botão m o carro vai transportar uma peça. Caso não exista nenhuma peça a ser transportada o carro vai aguardar. A prioridade das linhas é da esquerda para a direita (inicialmente, linha 1 com maior prioridade e linha 3 com menor prioridade).
Exemplo 5.2:
- Este problema é resolvido com a utilização de grafcets parciais.
- A escolha de sequência é definida pelo uso de prioridades.
- A prioridade das linhas é alternada, desta forma as linhas deixam de ter sempre a mesma prioridade.
- Alteração das funções associadas às transições, no início da escolha de sequência, em conjunto com o grafcet parcial de prioridade permite implementar a prioridade alternada.
- Verificar como escrever funções de recetividade mais complexas que permitam adaptar o problema ao que é proposto.
Nota: Existem vários botões, por baixo do botão/interruptor m, que permitem controlar o decorrer da animação. Assim, para uma melhor compreensão da evolução do grafcet é possível pausar a animação e acompanhar a sua evolução passo a passo
. A qualquer momento pode ser retomada a execução normal
. O botão
permite inicializar toda a animação.
Para o mesmo problema proposto em 5.1, pretende-se implementar prioridades nas linhas mas de uma forma alternada. Uma linha tem prioridade sobre as restantes apenas uma vez, após esse momento é dada a prioridade à linha seguinte. Inicialmente a prioridade é para a linha 1, de seguida linha 2 e depois linha 3, voltando no final à linha 1 e assim sucessivamente.
Nota: Os textos das animações estão conforme o acordo ortográfico antigo.