Paralelismo Estrutural
Nota: As animações poderão apenas funcionar se o "Zoom" do browser estiver a 100%. Caso seja necessário ajustar, aceda às definições/opções do browser.
Problema:
Considere os dois carros representados na figura:
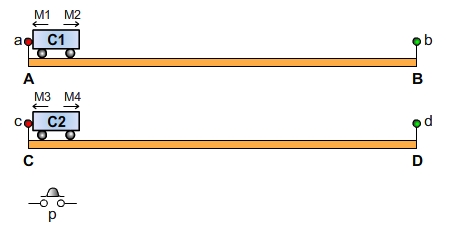
Na situação de repouso os carros encontram-se no extremo esquerdo do percurso. Os motores M2 e M4 deslocam para a direita os carros C1 e C2, respetivamente. Os motores M1 e M3 movem os carros C1 e C2 para a esquerda. Nos pontos A, B, C e D existem os sensores fim de curso: a, b, c e d, que detetam a presença dos carros. Ao pressionar o botão p ambos os carros devem efetuar uma viagem de ida e volta (ABA e CDC). Os carros deslocam-se de forma independente um do outro, pois mediante a carga que transportam podem movimentar-se a velocidades diferentes. Utilizando Grafcets vão ser implementados os controladores lógicos que correspondem às seguintes situações:
Exemplo 3.1:
- Observar a evolução do paralelismo estrutural.
- Etapa de espera no final das sequências permite fazer o sincronismo do movimento dos carros.
- Transição 6 com recetividade sempre validada, permite a evolução rápida do grafcet após o sincronismo e prepara o grafcet para nova sequência.
Nota: Existem vários botões, por baixo do botão/interruptor m, que permitem controlar o decorrer da animação. Assim, para uma melhor compreensão da evolução do grafcet é possível pausar a animação e acompanhar a sua evolução passo a passo
a animação e acompanhar a sua evolução passo a passo
 . A qualquer momento pode ser retomada a execução normal
. A qualquer momento pode ser retomada a execução normal
 . O botão
. O botão
 permite inicializar toda a animação.
permite inicializar toda a animação.
Ao premir o botão p é iniciado o movimento dos carros C1 e C2. No regresso, apenas é permitida uma nova viagem quando ambos os carros se encontram na situação de repouso. O carro que se deslocar mais rápido vai esperar pelo carro mais lento.
Exemplo 3.2:
- Utilização de grafcets parciais para a implementação do mesmo problema.
- Condições de recetividades iniciais (transições 1 e 5) adaptadas ao sincronismo inicial dos carros.
- A recetividade que está sempre validada (transição 6 do exemplo anterior) é substituída (no grafcet parcial) pela variável associada ao sensor de movimento do carro oposto quando está na posição inicial, permitindo o sincronismo no final das sequências.
Nota: Existem vários botões, por baixo do botão/interruptor m, que permitem controlar o decorrer da animação. Assim, para uma melhor compreensão da evolução do grafcet é possível pausar a animação e acompanhar a sua evolução passo a passo
. A qualquer momento pode ser retomada a execução normal
. O botão
permite inicializar toda a animação.
O mesmo exemplo com o uso de Grafcets parciais.
Exemplo 3.3:
- Evolução do paralelismo estrutural.
- Etapas de espera no final das sequências que permitem fazer o sincronismo do movimento dos carros.
- Estrutura de sincronização e ativação de sequências paralelas, quando os carros C1 e C2 encontram-se na posição B e D respetivamente.
Nota: Existem vários botões, por baixo do botão/interruptor m, que permitem controlar o decorrer da animação. Assim, para uma melhor compreensão da evolução do grafcet é possível pausar a animação e acompanhar a sua evolução passo a passo
. A qualquer momento pode ser retomada a execução normal
. O botão
permite inicializar toda a animação.
Ao premir o botão p é iniciado o movimento dos carros C1 e C2. O carro C1 ao chegar ao ponto B verifica se o carro C2 encontra-se no ponto D, se sim continua a viagem de volta, caso contrário vai aguardar pelo carro C2. O mesmo procedimento é aplicado ao carro C2. No regresso, é permitida uma nova viagem quando ambos os carros se encontram na situação de repouso. O carro que se deslocar mais rápido espera pelo carro mais lento.
Nota: Os textos das animações estão conforme o acordo ortográfico antigo.