Structural Paralelism
Problem:
Note: The animations could only work if the "Zoom" of the browser is equal to 100%. If you need to adjust, go to settings of the browser.
Consider the two cars represented in the following figure:
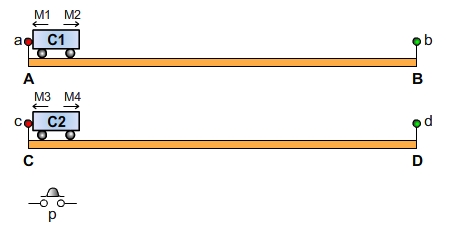
In the initial situation both cars are resting in the left extreme of the respective path. Motors M2 and M4 move the cars C1 and C2 to the right, respectively. Motors M1 and M3 move the cars C1 and C2 to left, respectively. In points A, B, C and D there are limit position sensors, respectively: a,b,c and d, detecting the presence of a car. By pressing button p, both cars should perform a two ways trip (ABA and CDC). Cars move independently from each other, as the load carried affect the traveling speed. Logic controllers are represented by Grafcets for the following cases:
Example 3.1:
- Observe the evolution of the structural parallelism.
- Waiting step at the end of sequences allows to perform the synchronization o the cars movements.
- Transition 6 with receptivity always validated, allows a fast evolution of Grafcet for another cycle.
Note: There are several buttons, bellow the button/switch, m, which allows to control the pace of the animation. Thus, for a better understanding of the Grafcet evolution it is possible to pause the animation and go through the evolution frame by frame
the animation and go through the evolution frame by frame
 . At any moment the normal pace can be resumed
. At any moment the normal pace can be resumed
 . Button
. Button
 allows to re-start the animation.
allows to re-start the animation.
By pressing button 1 starts the movement for both cars C1 and C2. After finishing a trip cycle, a new trip is allowed if both cars are in the starting position. The car finishing first its cycle, will have to wait for the other car (slowest).
Example 3.2:
- Use of partial grafcets to implement the same problem.
- Conditions of initial receptivity’s (transition 1 and 5) adapted to the initial cars synchronism.
- The receptivity is always validated (transition 6 of previous example) is replaced (in the partial grafcet) by the variable associated to the opposite car movement sensor when it is in the initial position, allowing the synchronization at the end of sequences.
Note: There are several buttons, bellow the button/switch, m, which allows to control the pace of the animation. Thus, for a better understanding of the Grafcet evolution it is possible to pause the animation and go through the evolution frame by frame
. At any moment the normal pace can be resumed
. Button
allows to re-start the animation.
The same example with partial Grafcets.
Example 3.3:
- Evolution of the structural parallelism.
- Waiting steps at the end of sequences which allow to synchronize the cars movement.
- Synchronization structure and activation of parallel sequences, when cars C1 and C2 are in positions B and D, respectively.
Note: There are several buttons, bellow the button/switch, m, which allows to control the pace of the animation. Thus, for a better understanding of the Grafcet evolution it is possible to pause the animation and go through the evolution frame by frame
. At any moment the normal pace can be resumed
. Button
allows to re-start the animation.
The movement of cars C1 and C2 is started by pressing button p. When car C1 reaches point B, it is checked if car C2 it is at point D. If it is, C1 continues the return trip, otherwise it waits for car C2. The same procedure is applies to car C2. In the return, a new trip cycle is allowed when both cars are at the resting situation. The car which moves faster waits for the slowest car.